- Python
- Controls
- Optimization
Model Predictive Control of a Rod Pump
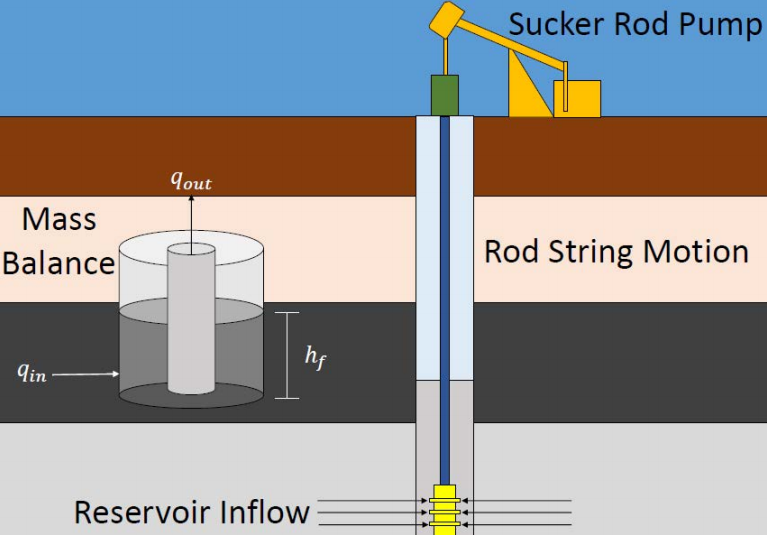
Situation: Develop a control system to control the fluid level height of a sucker rod system that takes into account rod pump, well, and reservoir dynamics.
Task: Design a model predictive controller (MPC) and moving horizon estimator (MHE) to automatically control fluid height in a sucker rod well.
Action: Designed a moving horizon estimator to determine uncertain well parameters using available surface measurements. Developed an MHE/MPC control algorithm to adjust the stroking speed of a sucker rod pump to maintain fluid level above the pump.
Result: MHE/MPC provided the best control when compared against PI and pump-off control. Results from this study were accepted to be published by Computers and Chemical Engineering Journal.